


Best paper
Robotics work recognized at international conference



2:07 p.m., Oct. 10, 2011--The American Society of Mechanical Engineers (ASME) recently recognized Sunil K. Agrawal’s robotics research with the best paper award at the 35th Mechanisms and Robotics Conference, held in Washington, D.C.
Robots have made tremendous inroads into industries for manufacturing and assembly, and their use in performing repetitive tasks has grown significantly in recent decades. However robotics is still in its infancy with regard to development of long reach robotics, such as those used in shipyards and airplane hangars, and as a training tool for neuro-rehabilitation of functional movements, such as in people affected by stroke.
Honors Stories

National Medal of Science
Warren Award
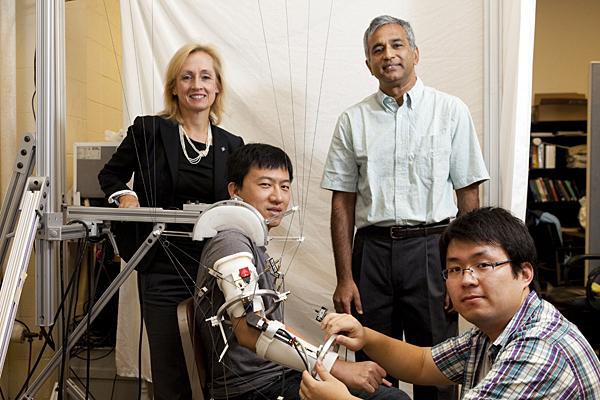
Agrawal, professor of mechanical engineering and director of the Mechanical Systems Laboratory at the University of Delaware, has devoted more than 10 years to researching and developing new classes of robots, now popularly known as “cable driven robots,” to address these applications.
Cable-driven robots are typically lightweight in structure and offer advantages in rehabilitation training for patients with impaired neural functions or weak limbs. Too many cables, however, can result in control complexity, higher system set up costs and greater possibility of cable interference.
The award winning paper, co-authored with Shabbir Kurbanhusen Mustafa , currently a visiting post-doctoral researcher at Carnegie Mellon University (supported by the Agency for Science, Technology and Research, and the Singapore Institute of Manufacturing Technology), was entitled “Reciprocal Screw-Based Force-Closure of Cable-Driven Closed Chains.” It provided a systematic theory to address design questions associated with cable-based systems using spatial geometry.
“One of the scientific challenges in the design of 'cable-driven robots' is selecting the architecture of cables,” says Mustafa. “The number of cables and their routing from proximal to distal segments is critical in creating the appropriate external forces required in executing the application tasks.”
Agrawal’s dissertation at Stanford University provided the fundamental theory for the award-winning paper. Agrawal had used this theory extensively for analysis and design of another class of robots called “parallel actuated robots” in 1990. Mustafa adapted the theory for design of “cable based robot” systems while a post-doctoral researcher at UD.
“I would like to give credit to my research team for their thoughtful and dedicated work, and to my colleagues for creating a highly stimulating work environment,” said Agrawal, whose work is supported by multiple grants from the National Institutes of Health and the National Science Foundation.
Agrawal will discuss this and other associated research during a presentation entitled “Novel robots for functional training of neural impaired adults and children,” Friday, Oct. 14, at 12:15 p.m., in 114 Spencer Lab. The lecture is part of the Department of Mechanical Engineering fall seminar series.
Article by Karen B. Roberts
Photo by Ambre Alexander