|
|
Expedition
Expedition | People
|
Log - July-29-2003
by Gerhard Behrens and Robert McCarthy
Previous | Next
Coring Equilibrium
Robert McCarthy |
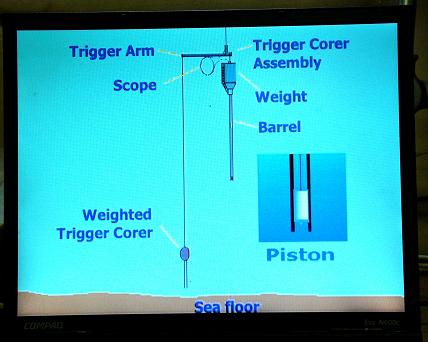
| Late last night and all day today the science crew spent piston-coring. This entails lowering a long, hollow, steel tube with a large 5000 lb. weight at the top to the ocean floor in hopes of driving the tube into the bottom mud (sedimentary record). The sediments stay in the tube and the scientists bring it back up to the ship for later analysis. The design is rather clever, and invokes a piston, hence the term “piston coring”. The design is best illustrated from the following sequence of diagrams, (courtesy of Oregon State University’s College of Oceanic and Atmospheric Sciences, in cooperation with the University-National Oceanic Laboratory Systems, and the United States Coast Guard). |
 |
 |
 |
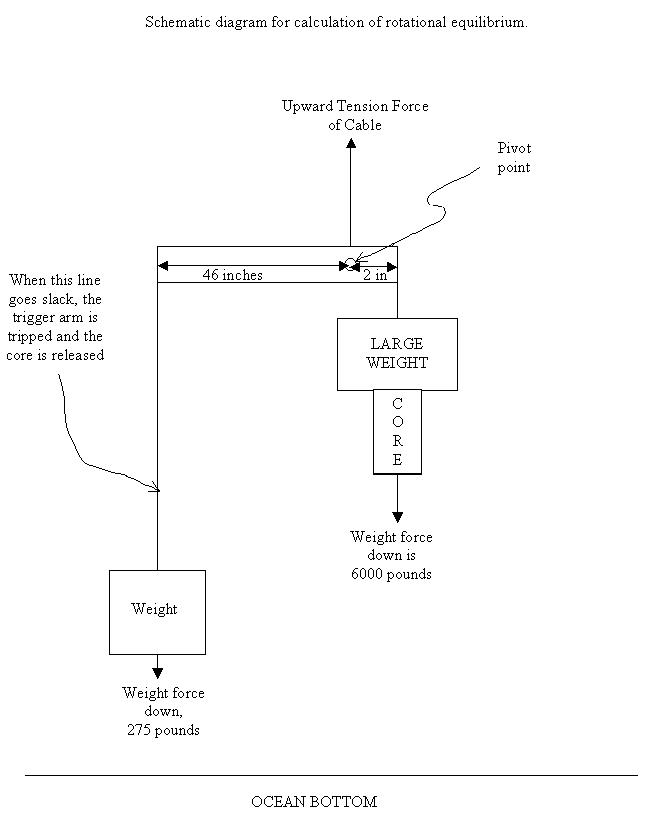
| Fig 1 shows the coring setup. The trigger arm at the top of the figure is attached to a winch on the ship via a very long cable. This trigger arm is in both translational and rotational equilibrium upon descent to the ocean bottom. This means that there is no net force acting on it, and no net torque acting on it either. Since there is no net force, the downward force of gravity balances the sum of the upward tension force in the cable and the buoyant force supplied by the displaced seawater. Since these forces balance in the vertical direction, the system does not accelerate due to Newton’s Second Law of motion, F=ma. But it is still moving downward at a constant velocity, and thus has a lot of momentum. Momentum is the product of mass times velocity. But, also important in this diagram is that the trigger arm can pivot around the cable’s attachment point. So in order to keep it as shown, the sum of the torques about the attachment point must also be zero. If we know that the large weight plus the core weight together is about 6000 lbs., and the length of the lever arm is 46 inches (the perpendicular distance from the force to the pivot point), we can calculate the clockwise torque about the pivot. If we do the same calculation for counterclockwise rotation due to the trigger weight, they should balance. The short lever arm is 2 inches. So the calculated clockwise torque due to the piston core is 1000 ft-lbs, and the calculated counterclockwise torque (assuming a weight of 275 lbs on the left) is 1050 ft-lbs. To the degree of accuracy of these measurements, the agreement substantiates rotational equilibrium. (Actually there is a pin near the pivot point that supplies a clockwise torque, because the trigger weight is over designed so not to release the piston core until that supporting cable goes slack. The weight is probably closer to 500 lbs. It is still in rotational equilibrium none-the-less.) |
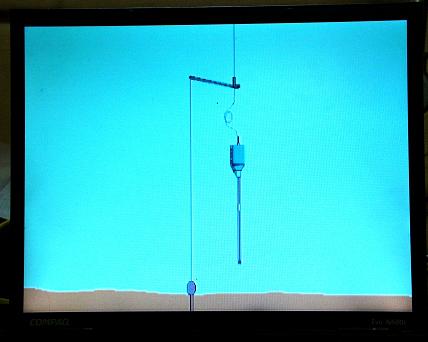
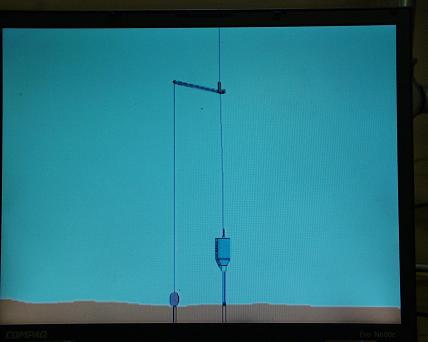
| Once the trigger weight hits the bottom (the weight with the longer cable), the trigger mechanism feels an unbalanced torque, and rotates clockwise. This rotation “trips” the release on the trigger arm, sending the large weight with the core in a 24 ft free-fall. On impact with the bottom, the large mass and larger velocity combine to give that core a large momentum, which will drive the core into the sediment. The piston (in the core) ideally stops about 1 ft above the sediment, and the whole outer core penetrates into the sediment 10 to 20 meters. The core fills up with sediment without greatly disturbing the sedimentary record because the piston is free to move up inside the core. (See figs 2 and 3.) There is a one-way valve at the tip of the core; trapping the sediment. So when they pull the core out of the bottom, all the sediment stays in. It’s quite an operation to watch. |
| Check the picture section to see action shots of the piston-coring, and also Gerhard’s log for July 30th. |
 |
Helicopter operations
Gerhard Behrens |
| Every day, one thing seems to grab the ship’s attention. Yesterday, the 28th, it was helo ops, which is Coast Guard talk for helicopter operations. No one says helicopter on the ship, everyone says, hee-low. |

Take off for Pond Inlet. |

Props folded in the hangar. |
That day’s mission was flying to Pond Inlet, a town of a few hundred on the northeast side of Baffin Island. There were three very good reasons to make this flight. One reason is a crewmember had to go home for a funeral, and this was the closest place to drop him off so he could get an airplane flight home. The second reason is more complicated. The team that is building the moorings (equipment that will stay near the bottom of the ocean for 3 more years) found out that some cables were missing from a box. It turns out the company who makes the moorings forgot to pack the cables. Ooooops. So, the company had to send a worker from San Diego, CA, all the way to Pond Inlet, Nunavut, Canada. The Coast Guard helicopter was able to meet the plane and pick up the cables. The third reason the helo flew was to give the pilots a chance to practice. Every pilot needs mins. That is short for minimums, which means each pilot and rescuer has to practice for a certain amount of time. They practice things like regular flying, landing, using the safety hoist, and doing a swim rescue. |
| Lots of the science crew and ship crew came out to see the helo fly away and return. It was very beautiful to see it lift off and touch down so gracefully. The return of the helo with the cables was also very important. Without them, one set of experiments would have been in big trouble. |

Instrument Panel. |

Bob and Gerhard dream about a flight. |
If you want to learn more about the helicopters and the crew, click on the Fun Facts button. |
|


