 |
| Sunil Agrawal’s mechanical engineering team with the cable robot. Team members are, from left, Yuhong Zhang, Himanshu Pota, Agrawal and Jason Pusey. |
Sunil K. Agrawal, associate professor of mechanical engineering at the University of Delaware, has been selected by the Alexander von Humboldt Foundation as one of 10 researchers worldwide to receive a 2001-2003 Friedrich Wilhelm Bessel Research Award.
The prestigious award includes funding for collaborative research to be done in Germany, travel costs and financial assistance for academic conferences in Germany and other European countries. To be eligible, a scientist and/or scholar must be recognized internationally and have had proven success in research.
The Bessel Research Awards are endowed by the German Federal Ministry of Education and Research and given annually to young foreign scientists and scholars who are already recognized as outstanding researchers in their fields. The awardees are invited to conduct research projects of their own choice in Germany in cooperation with German colleagues for periods of between six months and one year.
“The idea of the award is to create international collaboration between German scientists and scientists around the world,” Agrawal said. He said he considers being selected a great honor and is looking forward to spending the summers of 2002 and 2003 in Germany, at the Technical University of Darmstadt, working on the latest research in robotics.
Agrawal studies mechanics and movement science, especially as they relate to the construction of machines that can simulate human-like motion. He directs the engineering college’s Mechanical Systems Laboratory (MSL) that focuses on the behavior of dynamic systems as they apply to robots and manipulators, high-speed machines and manufacturing. The faculty and students concentrate on developing algorithms to predict and control the movement of mechanisms designed to replace humans in repetitive labor-intensive jobs.
Agrawal and his German colleagues will be working on refining a cable-suspended robot, developed by the National Institute of Standards and Technology, so that it can carry out long-reach tasks—like transporting items from one place to another or painting airplanes or aircraft carriers. Most industrial robots are stationary and have limited range of motion, so they can’t perform large workspace tasks efficiently.
Cable robots can manipulate platforms suspended on cables that carry tools, but there is a problem getting the longer cables to function properly. For example, they have trouble sustaining positive tension over long distances and under unusual external conditions. The engineers will concentrate on configuration design, trajectory planning and control and vibration suppression. He said they hope to maximize range and control while minimizing vibration and slack. “It’s like manipulating a puppet,” he said.
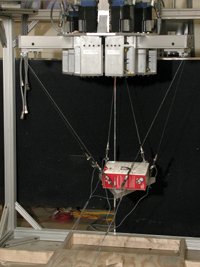 |
| The cable robot constructed by Sunil Agrawal’s team. |
Flobot the Robot (which can repair a satellite in space), Spine Robot (moves like the human spine and does repairs in tight places) and Snake Robot (which works in hazardous environments) are all inventions of Agrawal and his graduate students. He said that once they do the math and create a prototype, the rest is up to companies or organizations that may be interested in developing the concept for industry or other practical applications.
Agrawal received his doctoral degree in mechanical engineering from Stanford University in 1990 where he was a research assistant in the university’s robotics lab. He taught and conducted research at Ohio University from 1990 until joining the UD faculty in 1996.
He received a National Science Foundation (NSF) research initiation award in 1991 and, in 1994, the NSF Presidential Faculty Fellow Award, Alexander von Humboldt Research Fellowship and Fritz and Dolores Russ Research Award.
He is an associate technical editor for IEEE Transactions of Robotics and Automation; the Journal of Mechanical Design, Transactions of the ASME; IEEE Transactions of Control Systems Technology and has served on the editorial boards of Multi-body Systems Dynamics and IEEE Control Systems Society Conference.
Feb. 25, 2002
|

